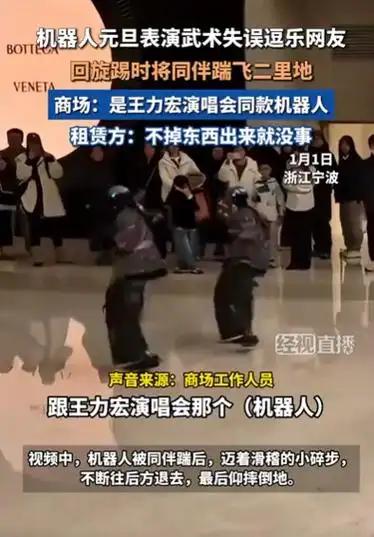
1月1日,浙江宁波某商场内,机器人元旦表演武术结果失误,回旋踢时将同伴踹飞二里地。视频中,机器人被同伴踹后,迈着滑稽的小碎步,不断往后方退去,最后仰摔倒地。 这个事件听起来既荒诞又令人担忧,反映出机器人在实际应用中的一些潜在问题。以下是一些可能的分析和建议: 技术故障或设计缺陷:机器人在表演中出现失误,可能是由于算法错误、传感器故障或硬件缺陷导致的动作控制失误。特别是在复杂动作如武术表演中,机器人需要精准的感知和控制能力。 安全措施不足:机器人与同伴互动时未能有效避免碰撞或误动作,显示出安全设计上的不足。应加强机器人之间的协作和避障机制,确保在演出或互动中不会造成伤害。 应急响应和故障处理:机器人出现失误后,表现出“退后”和“仰摔倒地”的动作,可能是系统没有及时应对异常情况的预案。未来应设计更完善的故障检测和应急处理系统,确保在出现偏差时能安全停机或调整。 公众安全与责任:在公共场合表演的机器人,必须确保安全措施到位,避免对观众或工作人员造成伤害。此事件提醒相关企业和组织应严格把控机器人安全标准。 后续改进建议: 加强训练和测试:在正式表演前进行充分的模拟和测试,确保机器人动作的稳定性和安全性。 优化感知系统:提升传感器的精度和反应速度,以更好地应对复杂动作和突发情况。 引入人机协作机制:确保人在场时能及时干预,避免机器人动作失控。 公众沟通:对事件进行透明说明,增强公众对机器人技术的理解和信任。 总之,此次事件反映了机器人技术在实际应用中的挑战,也提醒我们在追求创新的同时,更应重视安全和可靠性。