随着纯视觉方案的增多,很多朋友会问,没有Lidar,系统如何搞定通用(异形)障碍物?Occ是一个解题方式,之前我写过一篇关于Occ占用网络的科普,我再写一次,方便刚接触智驾的朋友了解,同时有些知识点,也需要更新了:
Occ是Occupancy的缩写,中文可翻译为:占用;在自动驾驶场景中Occ 缩写代表Occupancy Networks,占用网络;也可以代表Occupancy Grid,占用栅格;
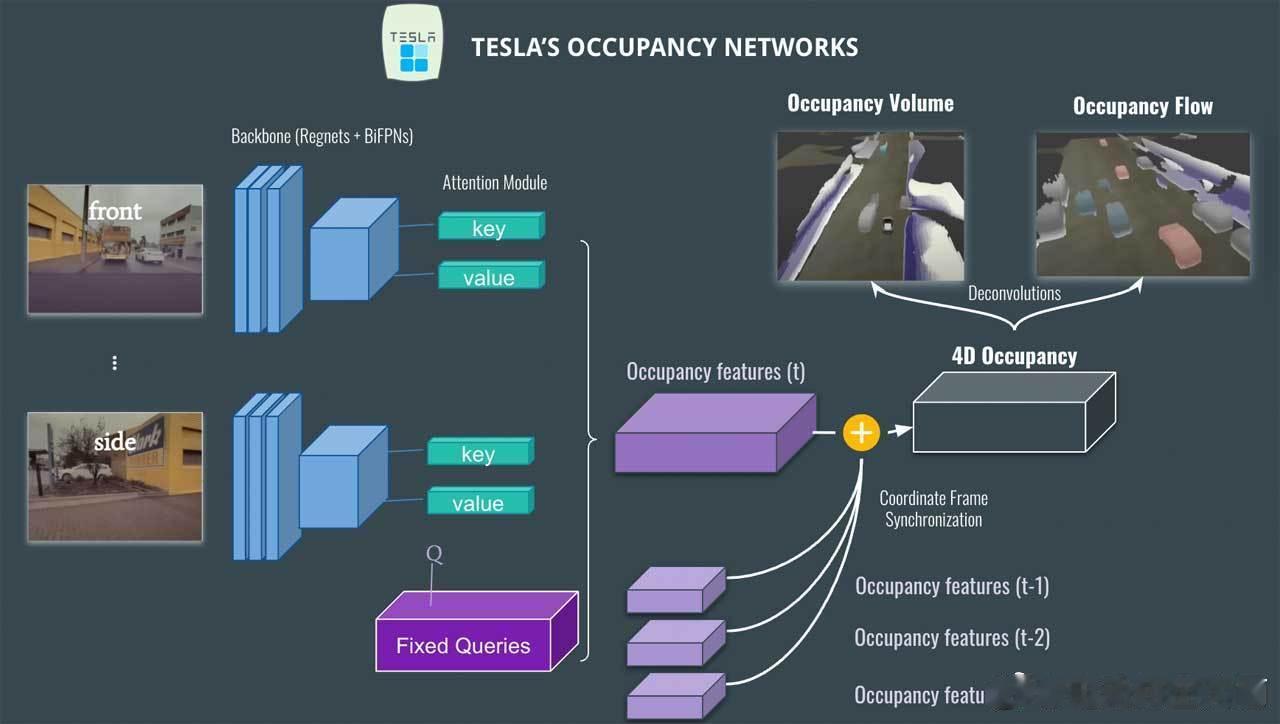
占用网络的概念,源自2019年CVPR上发表的一篇论文《Occupancy Networks: Learning 3D Reconstruction in Function Space》,首版发表于2018年12月10日,修订版发表于2019年4月30日。在自动驾驶领域,被特斯拉发扬光大,首个应用。特斯拉在2022年的AI Day上提出了基于Occupancy Network的感知方法。
而占据栅格,通常代表非纯视觉,采用多传感器融合的方案,比如华为所使用的GOD网络、蔚来的Occ1.0、以及理想和小鹏早期上车的Occ网络(其他家也有类似方案)。
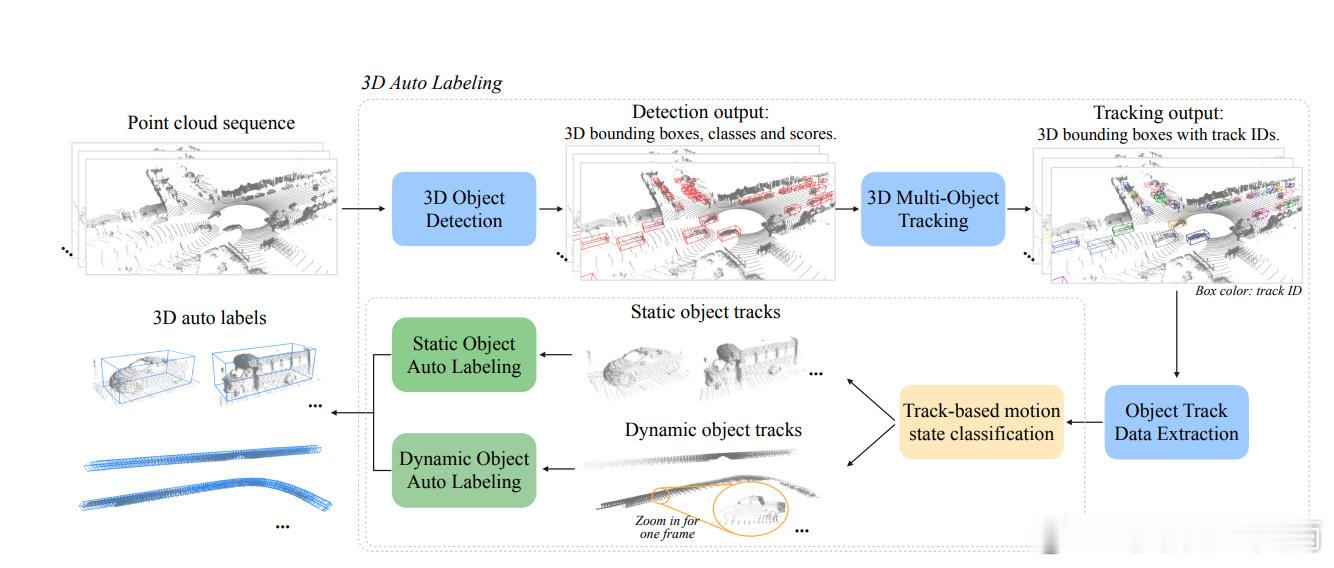
Occ是一种基于深度学习的三维重建方法,它通过深度神经网络隐式地表示三维表面。这种方法的核心在于使用神经网络为每一个可能的三维点分配一个0到1之间的占据概率,从而定义物体的occupancy function(占据函数)。与传统的体素表示、点云表示和网格表示不同,Occupancy Networks能够以无限分辨率编码三维输出的描述,而不会占用过多内存。
Occ应用到自动驾驶中,可以理解为:对真实障碍物的一种检测方式。古早的视觉算法,需要认识这个物体,才能规控,而Occ则不需要认识,它把物体以3D「栅格化」的形式,投射在BEV空间中,让车辆了解可行驶区域,能够更好的帮助车辆进行规划。
除了特斯拉,采用纯视觉占用网络的,还有蔚来的Occ2.0,行车已经应用在乐道车型上。极越的ASD(BOT网络)、以及小鹏XOS天玑版本之后;此前理想也上线了基于鱼眼的纯视觉泊车Occ,而这一次小鹏所演示的泊车3D Occ则更进一步,首次应用720°的全向视角。
可能有人会问,Occ对于近距离物体感知好,远距离怎么办?行车场景怎么办?通过深度学习,Occ网络可以做到类似于激光雷达的变焦效果。
比如极越的Occ,支持前向200m、120m、30m的三种检测能力;蔚来的Occ 2.0能够覆盖前向300米、左右侧、后向25米的感知能力;我这里没有小鹏、理想两家Occ的详细数据,但是各家都在储备纯视觉Occ的能力。
还有一种说法:在端到端时代,由于只有一个网络,Occ失去价值,将被抛弃。但从目前各家的落地方案来看,还会有Occ模块以及交互输出。所以Occ并没有被抛弃,而是作为多任务形态而存在。
随着深度学习能力的提升,大模型的应用,以及更出色的车端算力,Occ的检测精度也在大幅度提升,过去的上限是10cm,如今越来越多品牌,都在朝着5cm的精度而努力。