📍智驾方案
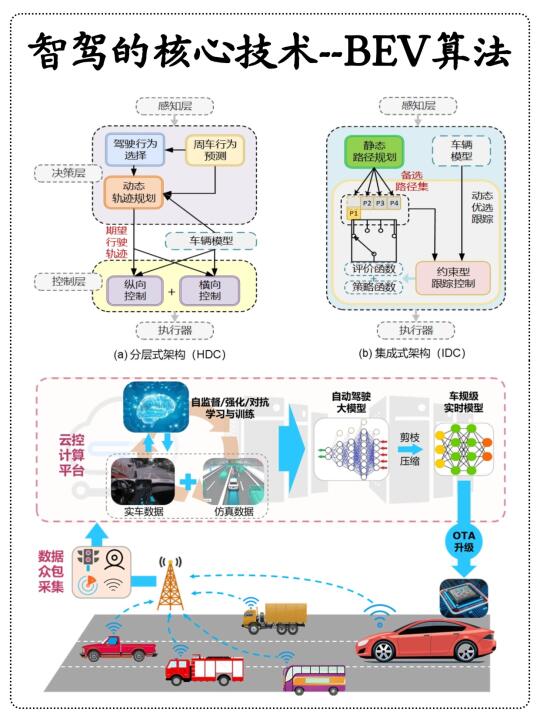
基于BEV+ Transformer做特征融合,相较于传统的CNN模型具有更好的全局感知能力;利用Transformer大模型可以提取特征向量,在统一的3D坐标系空间(BEV)内做特征融合,还可以结合时序信息进行动态识别,最后进行多任务输出,如静态语义地图、动态检测等。
.
🎯智能驾驶系统核心可以概述为三个部分:感知,规划,和决策
.
⭕视觉感知层
✅计算机视觉中物体检测任务的架构通常包含以下组成部分:
1️⃣Input: 输入是一幅或多幅图像,可能经过预处理以适应模型的需求,例如归一化、缩放等。
2️⃣Backbone:特征提取网络的核心部分,负责从输入图像中提取高层次的特征。它通常基于经典的卷积神经网络(CNN)结构,比如AlexNet、VGGNet、ResNet,这些网络通过一系列卷积层和池化层逐层抽象并压缩信息。
3️⃣Neck:在主干网络之后,这部分网络对不同层级的特征进行整合与优化,有时称为“中间层”或“特征融合层”。
4️⃣Detection Head:此部分用于预测最终的物体位置和类别。在特征提取(骨干)之后,提供输入的特征图表示。
5️⃣Output:输出通常是物体检测的结果,包括每个对象的类别标签、置信度分数以及精确的边界框坐标。
.
⭕路径规划层
✅特斯拉的Occupancy Network通过处理摄像头捕捉到的多视图图像数据,来预测三维空间中每个点被物体占据的概率。这一网络模型旨在实现对车辆周围环境的精确建模,从而帮助车辆在没有使用超声波传感器或雷达的情况下(纯视觉方案),也能有效地理解道路场景和进行路径规划。
.
⭕决策阶段:
✅成本优化—在生成的多条轨迹中,规划器会选择成本最低的那一条作为最优解决方案,以决定车辆接下来的行驶动作,输出规划行驶轨迹。