国产仿生灵巧手,已经Next Level
前言:国产灵巧手再升级,重构机器人触感边界。
具身智能的聚光灯依旧灼目,灵巧手也已从技术幕后走向产业台前。
作为人形机器人圈子里的焦点项目之一,特斯拉Optimus的2025年量产计划一直在调整。据多家媒体援引知情人士透露,当前特斯拉正面临机器人“手部”核心部件的研发瓶颈,需调动核心资源攻坚关键设计缺陷。
马斯克本人也在今年9月的一次播客访谈中直言,“包含前臂在内的手部系统,是整台机器人工程化落地的最大技术难点。”
事实上,在人形机器人与具身智能飞速发展的当下,灵巧手早已不是简单的执行部件,而是机器人实现环境交互与任务执行的核心终端,其技术突破直接决定机器人商业化落地进程,更是人形机器产业链的关键环节。尤其在触觉感知层面,如何精准复刻人手细腻的触感反馈与力控精度,更是长期横亘在灵巧手技术领域的一座大山。
正当行业目光聚焦于灵巧手技术攻坚之际,来自杭州“六小龙”阵营的强脑科技,近期推出了Revo 2仿生灵巧手触觉版本。
该产品不仅承袭了其前代灵巧手在轻量化设计、高负载比上的行业领先优势,更以“重构触觉边界”为核心研发理念,将多维度触觉感知能力深度融入仿生机械结构设计,为医疗、精密制造等对操作精度要求严苛的领域,带来了具备革命性意义的智能操作解决方案。
01.破局不可能三角,触觉缺失成行业核心瓶颈
灵巧手的发展始终面临着“不可能三角”困境——如何在重量、负载与感知精度之间找到最优平衡点。随着工业自动化向精密化、柔性化升级,单纯的力量输出与运动速度已无法满足复杂场景需求,触觉感知的缺失成为制约技术突破的关键。
传统灵巧手多依赖视觉导航与预设程序,面对易滑、脆弱或材质多样的物体时,往往显得“笨拙”。例如在抓取脆弱物品时,过大力道会导致破碎,力度不足则会滑落,而在辨别不同材质的物品时,更是无从下手,难以判断。
触觉感知技术的缺失,使得机械手始终无法真正实现“类人”的操作体验,这也成为制约其从工业场景向高端制造、医疗科研等领域渗透的关键障碍。
正是精准洞察这一行业痛点,强脑科技凭借多年在仿生智能手领域的技术积淀,交出了Revo 2仿生灵巧手这一创新答卷。
强脑科技成立于2015年,是中国非侵入式脑机接口领域的领先科技企业,也是首支入选哈佛大学创新实验室的中国团队,内地首家脑机接口领域独角兽企业。公司在智能仿生手等脑机接口产品研发上取得多项技术突破,成功研制全球首款量产直觉控制智能仿生手。
2018年11月,其智能仿生手登上央视《加油!向未来》舞台,失去右手的女孩林安露戴着智能仿生手与钢琴家郎朗合作,四手联弹,假肢的每个手指都能够单独分离控制。在此之后,强脑科技与供应链伙伴高效配合,不断对智能仿生手产品进行技术迭代和量产布局。
2020年,这款能够随“意念”活动的智能仿生手实现量产,成为全球首款实现直觉神经控制的量产智能义肢。2022年,它获得美国FDA上市批准。
在此基础上,强脑科技也将积累多年的仿生结构与控制技术拓展应用至人形机器人领域,2025年4月发布的仿生灵巧手Revo 2已凭借其卓越的整体性能树立了行业标杆。作为目前最轻的专业级灵巧手,Revo 2整机重量仅383g,相当于6个鸡蛋的重量,尺寸与iPhone 16 Pro Max接近(76mm×160mm)。
这一轻量化设计源于强脑科技对仿生结构的深度优化,借鉴人类肌骨骼结构和手指肌腱传动原理,采用特殊复合材料与模块化设计,在保证结构强度的同时大幅降低自重,为长时间操作与多设备集成提供了便利。
性能参数上,Revo 2创造了53:1的握重比行业纪录,整手握力≥50N,单手可承载20KG重物,能够稳定支撑壶铃等大负载物体;而在精密操作层面,其亚毫米级精度(0.1mm)可完成微小零件组装、笔芯丝滑控制等任务,包络结构设计还原人手张合运动轨迹,能完美贴合曲面物体,实现不同形状不同材质物体的稳定抓取。
智能控制方面,Revo 2支持遥控操作与人手协同,可完成弹钢琴等复杂动作,同时兼容485/CANfd/EtherCAT协议,最高1kHz实时控制频率,开放的SDK(Python/C/C++)更支持Linux/Windows/ROS系统,为开发者提供了广阔的二次开发空间。
02.国产企业打出王牌,重塑灵巧手触感边界
触觉作为人类最重要的感官知觉,几乎承担了全部人体与物理世界交互的通道,这也包含了人类日常基础劳动的所有场景。因此,触觉感知是灵巧手的核心竞争力,也是实现精细操作的关键。
强脑科技仿生灵巧手Revo 2触觉版本的核心突破,在于将“被动执行”的机械手升级为“主动感知”的智能交互终端。
通过仿生学设计将机械手的功能性与艺术性结合,高仿生指纹与精密关节结构实现接近人类手指的灵活度,同时搭载高性能驱动系统,确保力量与速度的平衡,重新定义灵巧手操作边界。
仔细来看,Revo 2触觉版本力分辨率达0.01N,在实际应用中,它既能完成0.05ml/滴的微米级滴定操作,又能动态调整抓握力度。
在官方宣传视频中,Revo 2触觉版本先是轻松拿起然后以较大力量捏碎鸡蛋,随即切换为轻柔模式捡起脆弱的蛋壳,整个过程无需人工干预,完全依靠触觉仿生手的力控自主完成。这种“刚柔并济”的力控能力,使得灵巧手在处理多形态物体时,具备了堪比人类的操作灵活性。
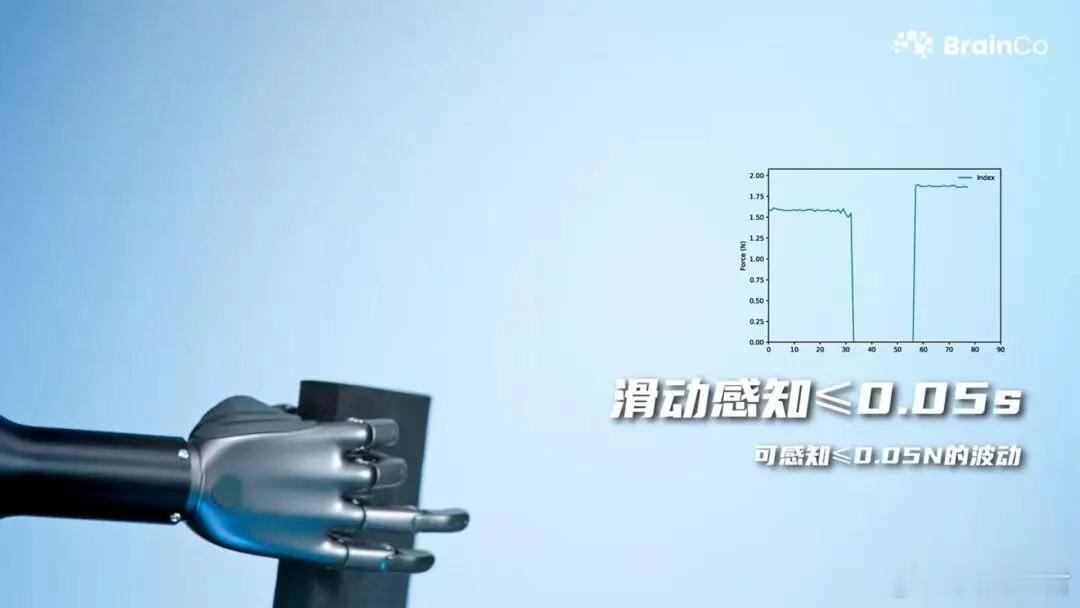
在复杂环境感知方面,Revo 2触觉版本也实现了三项关键突破:其一,滑动感知≤0.05s,可感知≤0.05N的力波动,即使面对快速滑动的物体,也能快速抓握,避免滑落;其二,接触感知力度≤0.05N,可瞬间感知物体软硬,通过自适应闭环控制算法,实时调整抓握力度大小,连续拿取不同重量的物体,例如泡沫海绵、木头方块等,实现稳定操作;其三,融合多模态触觉信号分析与智能识别算法,可快速辨别物体材质类别,如金属、海绵、大理石等30余种物体。
此外,Revo 2的自适应交互系统也将触觉感知与动作预判相结合,当物体距离手部小于1cm时,即可快速识别接近动作,提前调整关节姿态与抓握准备。
例如在弹奏电子琴时,当琴键靠近手指,灵巧手便能自动响应并控制按压力度,避免因力度过大影响钢琴音色或力度不足导致音符无法正常发出。这种预判式交互模式,使得人机协作更加自然流畅,大幅提升了弹奏效率与用户体验。
Revo 2触觉版本的技术突破,正在多个领域实现应用。值得注意的是,Revo 2在保持高性能的同时,并未牺牲行业适配性。其轻量化设计便于集成到各类机器人平台,开放的开发接口与多协议兼容能力,使其能够快速融入现有工业体系。
03.结语与未来
根据前瞻产业研究院数据,人形机器人中价值量排名前三的零部件分别是线性执行器、旋转执行器、灵巧手,价值占比分别为19.64%、19.64%、17.98%,灵巧手也因此被称为人形机器人的价值高地。随着人形机器人从实验室走向商业化量产,作为其“肢体”的关键部分,灵巧手也有望迎来规模化放量。
而强脑科技Revo 2灵巧手触觉版本的发布,不仅是单一产品的升级,更是对整个灵巧手行业发展方向的引领。强脑科技的探索表明,只有突破“感知-决策-执行”的闭环,才能真正实现机械手的类人化升级。未来,随着触觉技术与脑机接口、人工智能的深度融合,灵巧手将在更多领域赋能人类,开启人机协同的新未来。












![国人为什么选择苹果抛弃了华为?[思考]](http://image.uczzd.cn/1070714055367550517.jpg?id=0)



