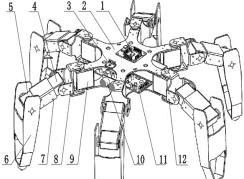
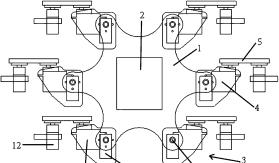
六足机器人以其出色的适应性和运动能力,被广泛应用于搜索救援、环境监测、军事等领域。 当地震废墟中的机器人突然停滞不前,当月球车在未知地表打滑,我们才意识到:让机器"看懂"脚下的路,比给它装上眼睛更重要。 传统视觉传感器在浓烟、辐射或沙尘中频频失效,就像2021年福岛核泄漏事故里,那些被辐射干扰"失明"的救援机器人,最终只能靠人工遥控完成作业。 足部传感器就像给机器人装上了精准的触觉神经。 德国博世公司用三维力反馈平台校准传感器,把误差控制在两根头发丝的范围内。 NASA的火星探测车更绝,靠放射性同位素热源补偿温度变化,在零下60度的火星地表,依然能感知砂石的细微凹凸。 这些看不见的校准工作,让机器迈出的每一步都有了可靠的"触感"。 从足部传来的原始数据像一团乱麻,需要精心梳理才能派上用场。 MIT的工程师用小波变换给数据"降噪",就像给嘈杂的录音去除背景杂音,让有用的信号清晰起来。 华为最新的边缘计算技术解决了数据延迟问题,80毫秒的时间差在5G加持下被压缩到几乎可以忽略,确保六足机器人六条腿的动作协调如一。 提取地形特征的过程,有点像从指纹中识别身份。 苏黎世联邦理工学院用LSTM网络分析步态周期,发现沼泽地会让机器人的步频变慢1.2秒,这个细微差别成了识别软地形的关键。 波士顿动力的工程师更实际,为了让Atlas机器人在废墟中跑得更快,他们宁可少看12%的细节,也要把计算速度提升3倍,毕竟救灾现场每一秒都可能关乎生死。 算法是机器人的"决策大脑"。 斯坦福大学把Transformer和CNN结合起来,让机器不仅能"记住"常见地形,还能"联想"出相似场景的应对方案。 中国极地科考队的机器人就靠这种混合算法,在北极冰原上识别出薄冰区域,比传统方法快了近两倍。 这些看不见的计算,让机器在陌生环境中也能找到踏实的落脚点。 最精妙的平衡往往藏在取舍之间。 NASA的工程师给火星车设计特征选择算法时,用遗传算法模拟生物进化,让机器自己"学会"忽略无关数据。 地平线J5芯片则用低功耗换来了持续工作能力,在没有太阳能充电的情况下,机器人也能靠节省的电量多探测两个小时。 这些技术细节,恰是机器智能从实验室走向真实世界的关键跨越。 当六足机器人的足部传感器再次传来熟悉的压力反馈,当LSTM网络捕捉到步态周期中那1.2秒的延迟,我们看到的不仅是技术的进步,更是人类把抽象数据变成可靠行动的智慧。 这种在误差与效率间寻找平衡的能力,让机器在极端环境中迈出的每一步,都带着对生命的敬畏和对未知的探索。