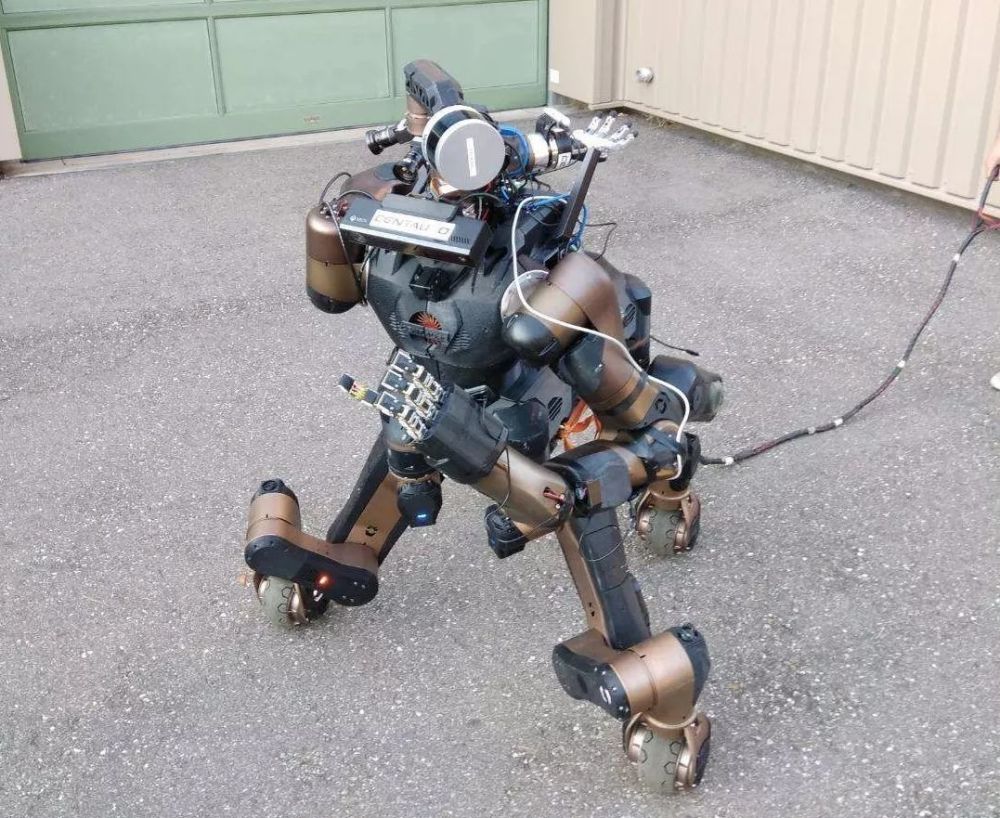
南科大半人马机器人重磅亮相,负重行走降耗35%,彻底改写人机助力新玩法。谁不曾体会过重负在身的举步维艰?腰酸背痛是常态,足底承压易受伤,传统外骨骼本是解忧之选,怎料助力效果差强人意,这般窘境何时才能打破?2026年2月,南方科技大学付成龙教授团队交出完美答卷,相关研究成果登上机器人领域顶刊IJRR,博士生涂志鑫、江轶豪领衔攻关,这款半人马机器人横空出世,让负重前行不再是难题。 传统外骨骼与人体硬绑相连,助力方向与行进方向相悖,忙活半天也仅能让代谢成本降低10%,这样的效果怎能满足实际需求?团队另辟蹊径,从四足动物负重形态中汲取灵感,打造出“人类智能领航+机器人力量负重”的全新人机协作模式。机器人不再是贴附人体的“外壳”,而是独立的“机械后腿”,通过弹性耦合接口与人体背部相连,人掌方向辨路况,机器扛重出蛮力,这般分工合作,岂不是事半功倍?其核心的软化弹性耦合机构更是暗藏玄机,受力小时刚度十足,响应迅疾如电;受力大时则柔中带韧,缓冲效果拉满,完美化解人机动力学耦合的难题,让助力与平衡实现动态解耦。 更令人称奇的是,这款机器人仿佛长了“读心术”,依托行走-交互协同控制框架,能毫秒级捕捉人体运动意图,无需人工指令,就能实现高精度全向跟随,还能在保持自身平衡的同时,为人体提供稳定的水平行进推力。数据不会说谎,当人体背负20公斤重物,约占体重三成时,穿戴这款机器人,净代谢成本直接降低35%,足底压力减少52%,行走时的稳定性与空手溜达别无二致,步宽变异性大幅降低,彻底摆脱负重时的摇摇晃晃。它的灵活性更是超乎想象,一米宽的窄路能轻松穿梭,台阶、斜坡不在话下,甚至能在狭小空间完成“8”字绕桩,复杂地形也能如履平地。 科技的魅力,正在于不断突破人类的生理极限。这款半人马机器人跳出了外骨骼“人形”的传统桎梏,重新定义了负重辅助的逻辑,将人类的决策优势与机器人的承载能力完美融合。军训拉练的负重前行,救灾现场的物资转运,野外勘探的设备搬运,有了这一“负重搭子”,都能轻松应对。小小机器人,藏着大智慧,它不仅是人机协同领域的一次全新突破,更是科技服务生活的生动体现。未来已来,这款机器人必将在更多场景发光发热,让负重行走成为轻松事,真正做到科技赋能,步履不停。