好的tag真的能激发人的灵感和创作欲望。辅助驾驶算力和算法哪个更重要 偶然看到发的微博,好家伙...又是熟悉的人儿在搞事儿,有内味儿了。也就这个话题说说我的看法。当然,这个一定要加一个前提,基于当前时点,面向未来L4无人驾驶,一定要二选一的话,那肯定是算法更重要。通俗点来说就是你给一个学渣再好的计算器,他高考也拿不了高分,你让他脑子够大,把十年高考都学会,没举一反三,没理解数学内核底层逻辑,他照样学习拉胯。
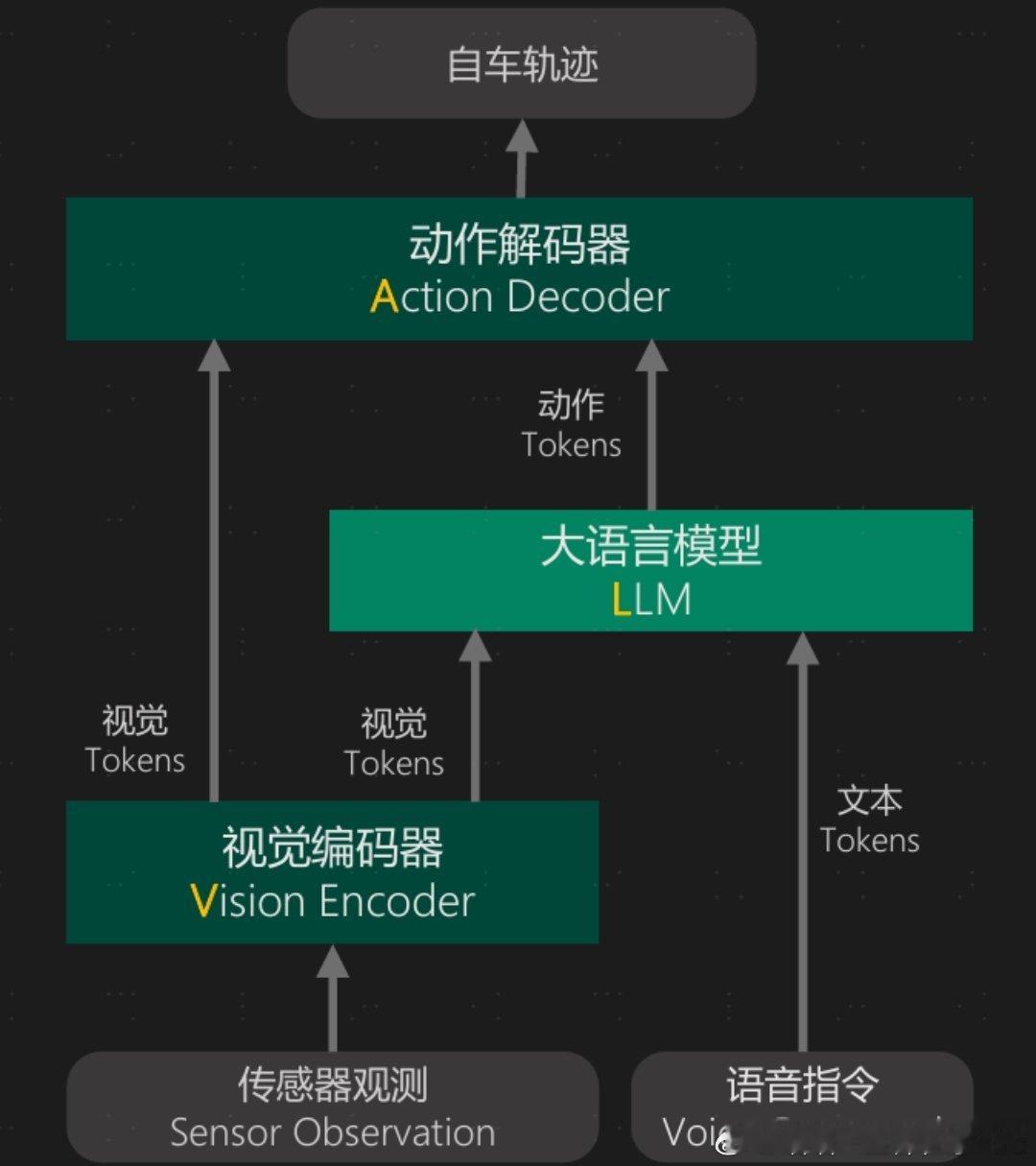
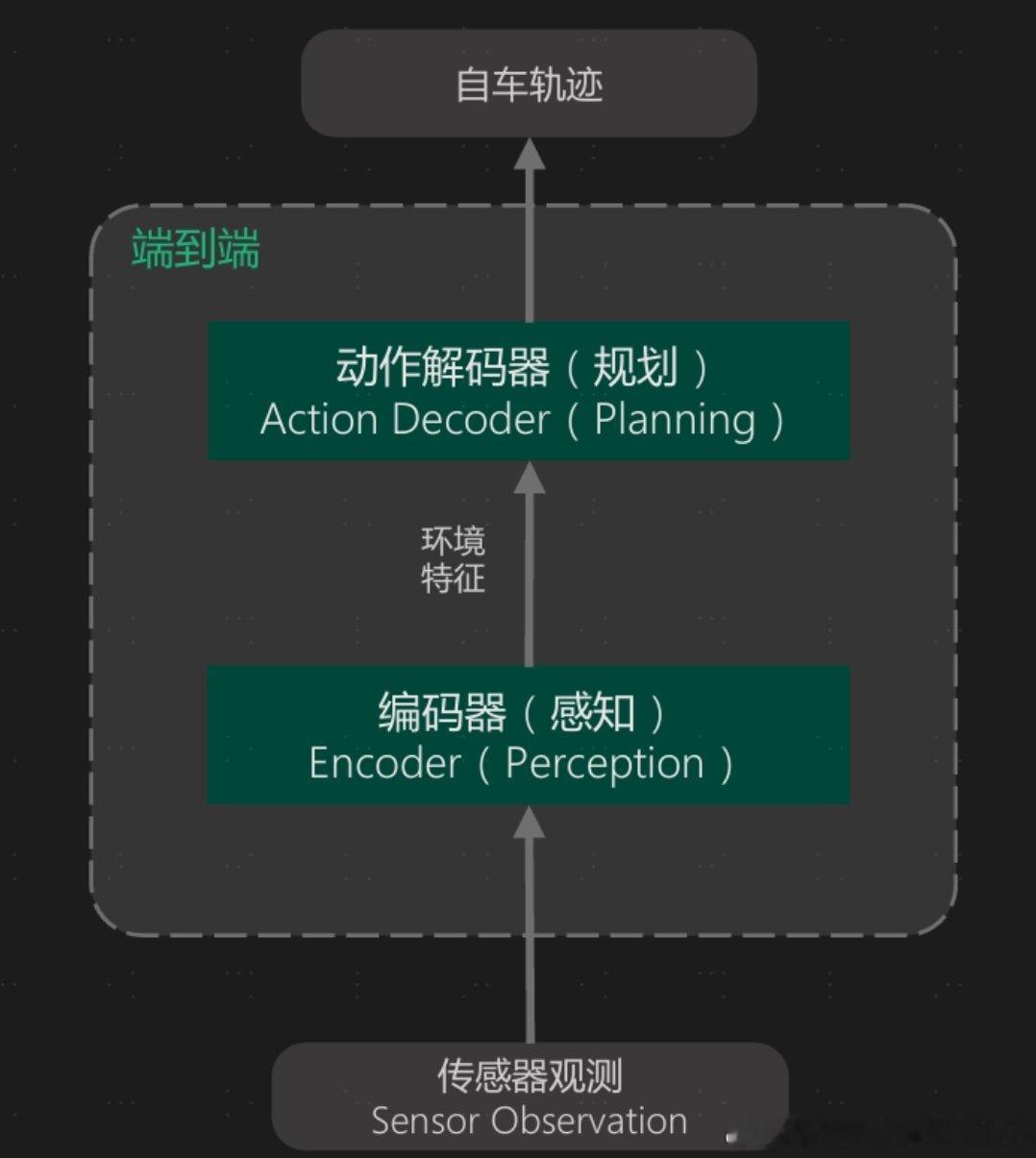
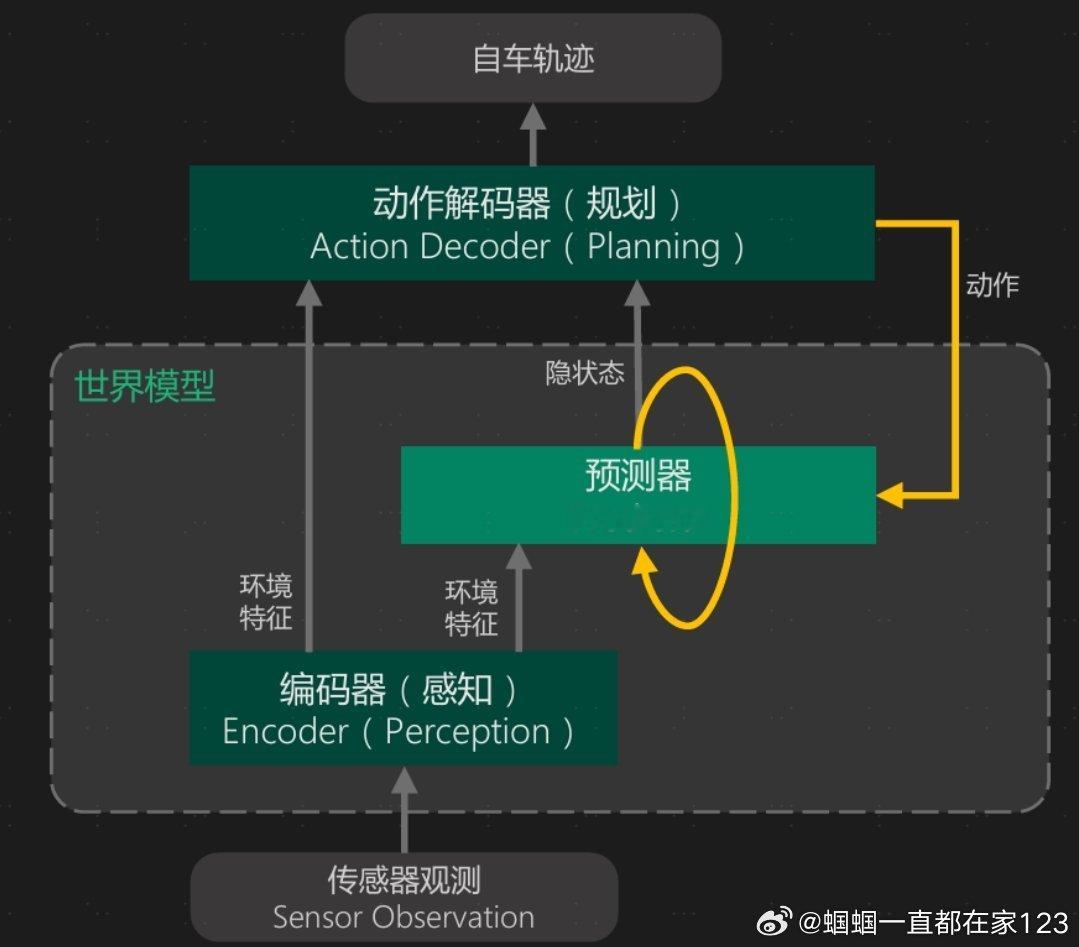
都说认知决定上限,同样的算法决定了长尾corner case的上限!这也是为什么小鹏会果断止损开发第二代VLA,理想疯狂投入AI~说说为什么算法更重要,早些年,从特斯拉宣传端到端开始,各家算法经历了第一波的跟风策略及营销潮流。各家都在照猫画虎,不管咋样,先跟着特斯拉宣传一波~1.0【端到端】马斯克总是在讲第一性原理,人开车靠的就是视觉啊,人开车靠的就是直觉啊?因此端到端大模型相比以前的算法,最好的地方就在于不再过度的依赖规则兜底,更多的是依赖直觉响应,从视觉感知到实际执行轨迹的映射响应变得更加敏捷。但短板同样非常明显,面对长尾corner case需要大量的高质量数据,无法闭环推演,不理解因果关系。这才有了算法的迭代,带来了算法的革命,预测未来!2.0【端到端-VLA】端到端的执行效率是高了,但短板咋解决啊?这才有了VLA算法,引入LLM推理能力,强化语言理解,强化泛化场景的决策规划,但这总归是大力出奇迹,需要700TOPS以上算力才行。3.0【世界模型】你要是一直用端到端,不管多大算力,算法都不知道因果关系,只知其然而不知其所以然,就像应试教育,给你换个题型就两眼一抹黑~世界模型更多是基于对物理规律,对因果关系的理解,有了预测未来的能力。(毕竟人开车就是防御性驾驶,得预测性的带着一定前提量做决策嘛~)各位大佬又觉得算法 vs算力哪个更重要呢?大v聊车