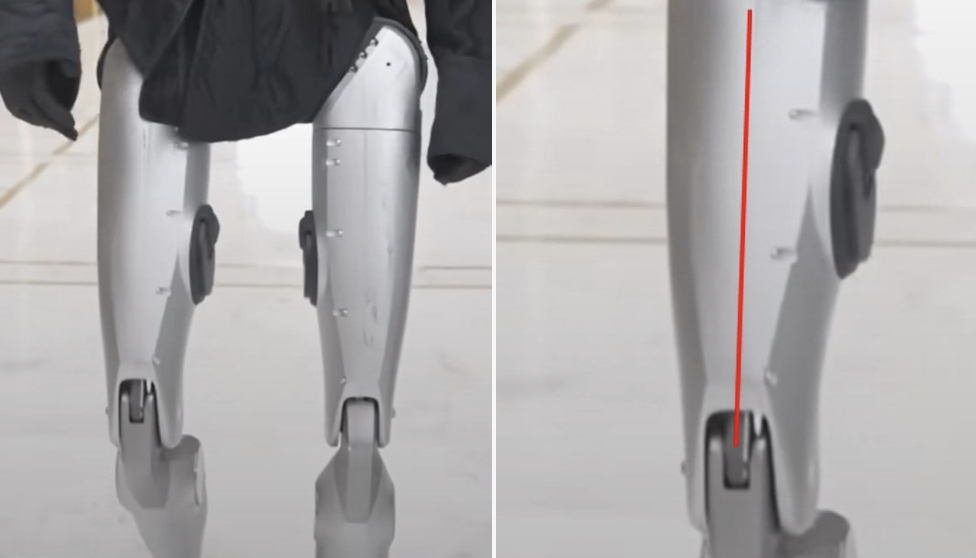
宇树H2升级远程驱动膝关节,很多人可能觉得 “actuator 位置上移” 是小改动,其实里面全是工程逻辑:把膝关节驱动部件往上挪,靠近身体核心(质量更贴近躯干),能直接减少髋部扭矩负担。这就像我们人类跑步时会收紧核心,减少多余晃动一样,机器人的质量分布越集中,行走、跳跃时的能耗越低,稳定性也越强,尤其能缓解长时间运动后的动力衰减问题。
更细节的是 “拉杆沿股骨居中” 的设计 —— 这种布局能避免膝关节运动时出现侧向力,减少部件磨损,同时让腿部动作更精准可控。对需要频繁做屈伸、转向动作的人形机器人来说,这种结构优化比单纯堆硬件参数更能提升实用寿命,毕竟工业场景和日常应用,都容不得 “华而不实” 的设计。一本书读懂chatgpt 人工智能机器人