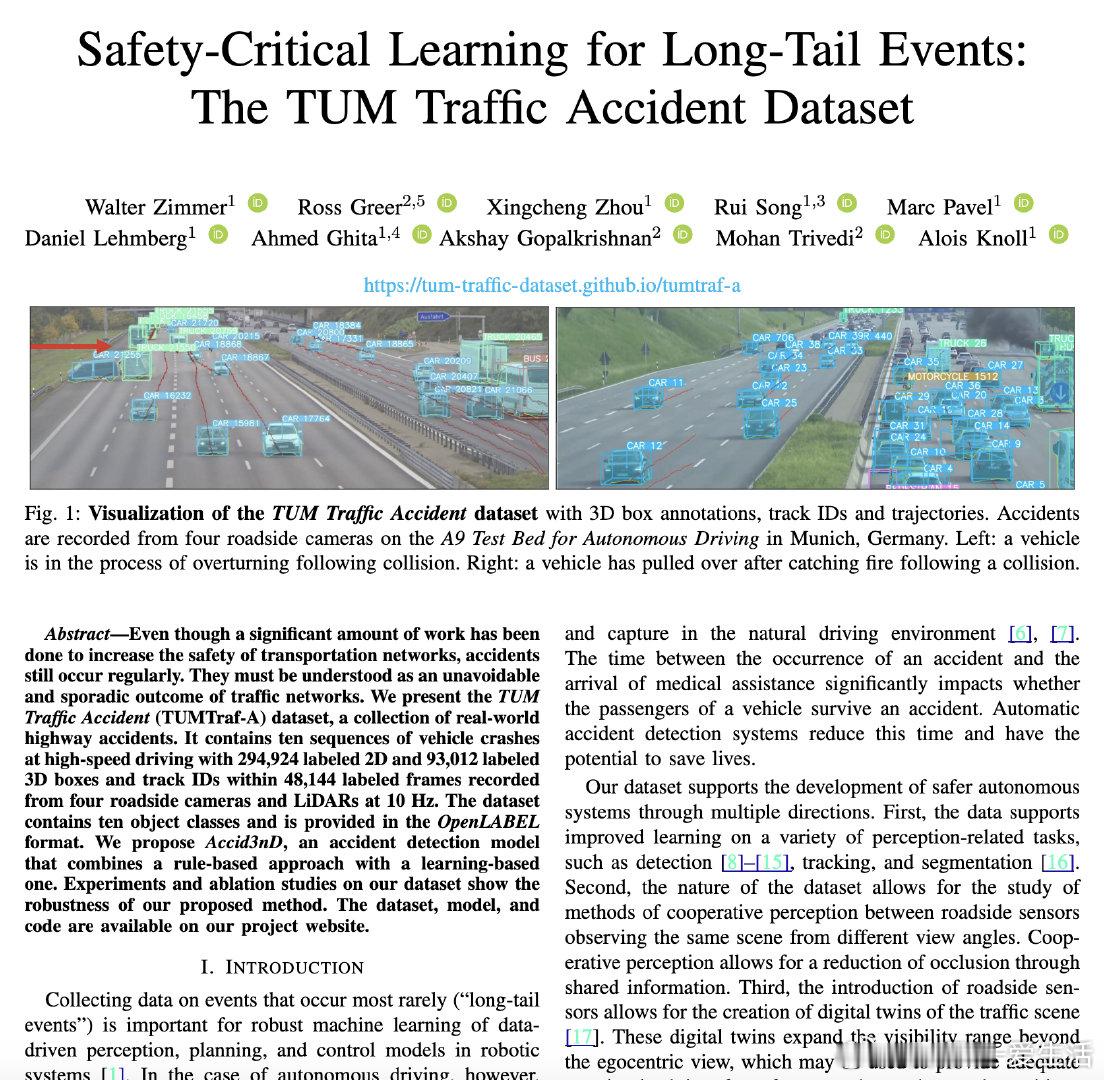
交通事故数据新标杆:TUM Traffic Accident 数据集及实时检测框架Accid3nD
• 汇集慕尼黑A9高速路真实长尾事故场景,含48,144帧、294,924个2D与93,012个3D标注,覆盖10类对象(车、人、摩托等),支持多视角路侧摄像头与LiDAR协同感知。
• 数据涵盖昼夜、不同天气,事故类型丰富,包括高速变道未察觉静止车、车辆翻覆、起火等,真实场景助力模型泛化与安全关键事件学习。
• 提出结合规则与深度学习的Accid3nD框架:先基于轨迹规则实时筛查事故候选,再用训练于该数据集的YOLOv8模型做图像级判定,连续帧检测与多摄像头融合显著降低误报。
• 实验验证该方法在真实高速公路环境下效果优异,规则方法可达95 FPS高效运行,兼顾准确率与实时性,推动自动驾驶安全感知向前迈进。
• 全套数据集、模型与开发工具包开源,促进学术与产业界共享,助力更可靠的事故检测与交通安全系统研发。
论文🔗 arxiv.org/abs/2508.14567
更多信息请访问项目主页🔗 tum-traffic-dataset.github.io/tumtraf-a
自动驾驶 交通安全 计算机视觉 长尾事件 多传感器融合
![桶们快疯了[捂脸哭]心知肚明却又无奈的去求证[笑着哭]](http://image.uczzd.cn/4271863511340716029.jpg?id=0)

![大A突破3800点了,十年新高啊,简直震惊[捂脸哭]](http://image.uczzd.cn/1040915598485307251.jpg?id=0)
![梓渝被小孩喊姐姐??[笑着哭]梓渝被小孩喊姐姐](http://image.uczzd.cn/12951514324867749559.jpg?id=0)