技术巡猎 小鹏汽车 小鹏GX 一个线控专利---线控转向系统的齿条力确定方法、装置和车辆。其实线控的原理大家都差不多知道了,“方向盘和车轮不存在硬连接”,自由度是上去了,但“驾驶手感”可真是个课题。传统机械转向的好处,重要的点在于路面给到轮胎的反作用力,会沿着整套机械结构一路传回来。压到井盖、过减速带、进弯压到侧向力,驾驶员手上多少都能感受到一点。线控转向把这根“物理绳子”剪断以后,车当然还是能转,但你手上的反馈就得靠系统自己“算”出来了。
这份专利想解决的就是这个问题。过去这个课题,一般靠齿条力预测---主要是靠动力学模型去做推算,比如看横向加速度、转向角度、车速这些量,再反推齿条上大概该有多大的力。这个思路本身没问题,但真实世界不是试验室。摩擦会出现变化,温度不是一成不变的,湿度也在波动,路面干扰等等等,你用一套相对固定的模型去算一个经常变化的环境,自然是不太够的。
事实上我们可以把齿条力理解成转向系统内部的一股“推拉力”。这个力决定了方向盘该轻一点还是重一点,也决定了回正是不是足够自然。线控转向没有机械直连之后,系统只能先尽可能知道轮端到底经历了什么,再把这个“感觉”翻译给方向盘。如果翻译不准,用户第一时间就能感觉出来----这时候它会对整台车的掌控感失去信任。
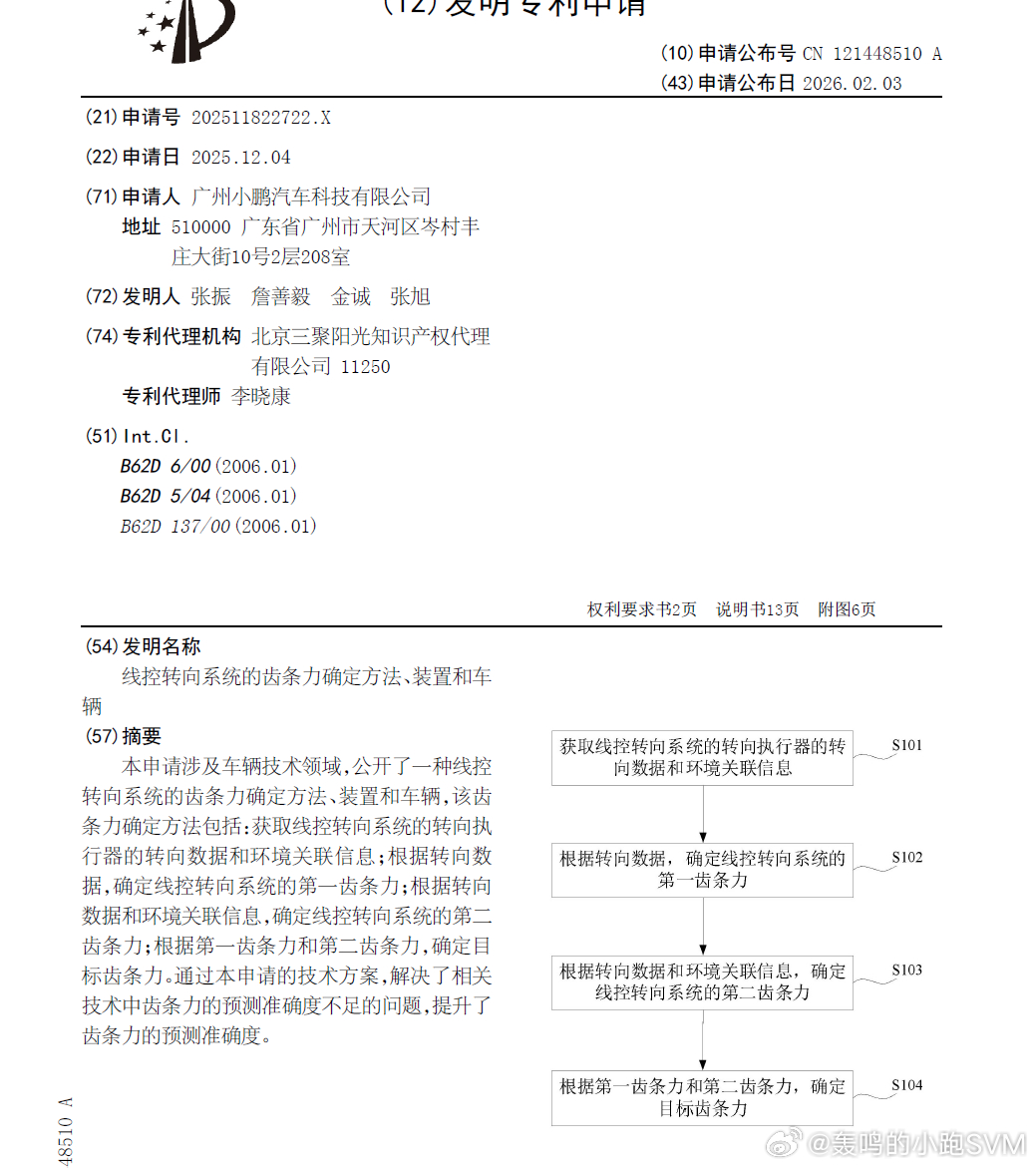
这个专利,在这里做了两件事情。第一条路,是传统的动力学模型。系统拿到转向执行器的数据,比如转向角、角速度、转向扭矩这些,先按老办法算出一个“第一齿条力”。这个值的好处是比较稳定、可解释、也非常可控。哪怕复杂工况下不够细腻,它至少是一个有物理基础的结果。
第二条路,会同时考虑环境因素。除了转向数据之外,它还会看转向执行器温度、环境温度、环境湿度、环境风速这些信息,再做数据预处理、时间对齐、特征提取,然后用一个基于时序的深度神经网络去预测“第二齿条力”。
想象一下,同样一把方向,在夏天暴晒之后、冬天冷车刚启动时、连续山路激烈驾驶之后,它的内部状态会一样吗?再比如同样一段弯,在干燥柏油和湿滑路面上,轮胎和地面的摩擦状态也不一样,“修正”,这就是它比传统方案更进一步的地方。
但更关键的,还不是“加了AI”,而是它没把安全感完全交给AI。专利里有一个处理逻辑,它会比较第一齿条力和第二齿条力之间的差值。如果两个结果差得太大,就不用神经网络那个值,而是退回到动力学模型的结果;只有当两边差得不大,系统才会采用那个融合了更多信息的预测值。
这就很像一个老司机和一个数据分析师一起坐在车里。平常工况下,数据分析师能看得更细,能补上很多传统模型看不见的变化;但一旦他说出的结论和老司机的经验差太多,最后拍板的还是老司机---在线控转向这种事情上,保守一点不是缺点,而是底线。
深度学习很容易被脑补成“黑箱决策”。但这里它先考虑的是物理模型兜底,再用时序模型提精度,最后做一层结果仲裁,这个体系感比单纯堆一个大模型靠谱得多。“时序”是一个比较重要的细节,它用的不是某个瞬间的数据,而是一整个时间窗口去看连续一段时间的数据。一个静态问题,在这里就变成了连续动态问题---结合前后过程一起看“意图”,才能更接近真实。
再往下,它用了因子分解机、深度神经网络、多头注意力这些模块去提特征。普通用户不用纠结这些名字,知道一点就够了:系统在找“哪些因素经常一起出现”“哪些变化更关键”“哪些历史信息对当前判断更有帮助”。它做的不是机械地套公式,而试图从连续驾驶过程中,把那些复杂但真实存在的规律给挖出来。
专利里也不是说了如何训练,还讲了部署。大意就是:先在不同工况下采集底盘数据和真实齿条力数据,训练出模型,然后通过OTA下发到车上。车端实时运行时,SoC跑深度学习推理,MCU跑动力学模型,两套结果一起工作,最后给出齿条力预估值。注意这里的重点不是“能OTA”,而是它从一开始就是在按量产控制器的路径去搭建---采什么数据、怎么训练、怎么下发、车端谁负责算、谁负责兜底,它都想过了。
所以这套存在,对GX的意义是什么呢?它的方向盘会更像一台“真的车”,而不是一个电子游戏手柄。转向体验的高级感很多时候就是这么一点一点磨出来的。
它也不只是舒适问题,也关系到主动安全。因为线控转向如果想进一步和主动制动、稳定控制这些系统协同,在紧急情况下做更合理的转向干预,前提就是系统得更准确地知道轮端到底发生了什么。齿条力估得更准确,整个系统对车辆状态的理解才更扎实,后续控制才更有底。
这事大概就是这样。线控转向看着只是少了一根机械轴,实际上考的是整车厂对“真实驾驶感”这件事到底理解到多深。